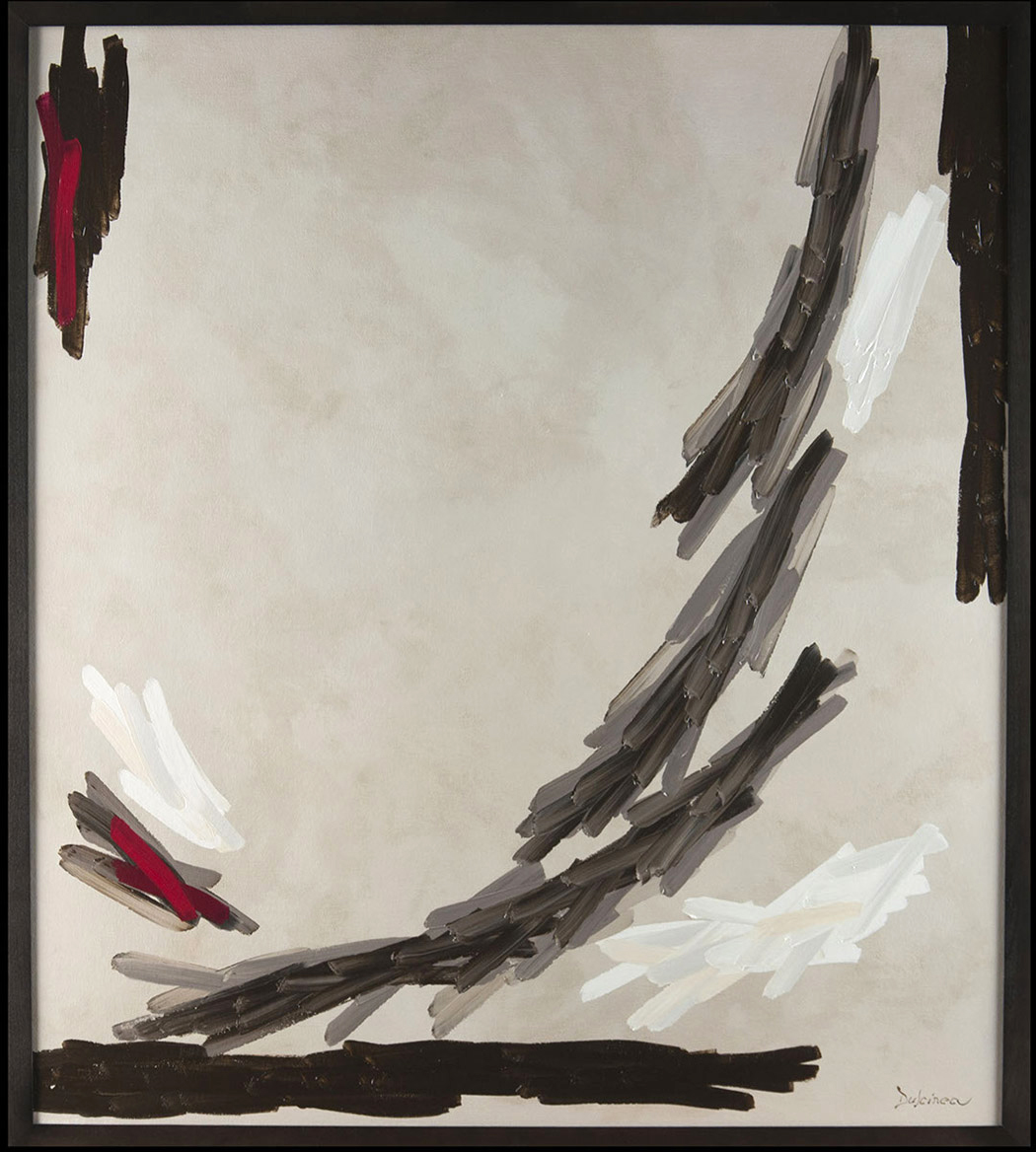
Capriccio
2006
54” x 48”
Brushstrokes: 269
View in Gallery
The word can mean, “a lively piece of music, typically short and freeform” or a “work of art representing a mix of real and fantastic features.” Do you hear the tune? Do you see the fantastical?
Capriccio is a painting all about entertaining the eye through use of visual movement and color. Paul Kirby’s Swedish and French artistic inspirations combined with studies of Mannerist composition and filtered through complex adaptive systems to produce a result that evokes spontaneity, movement, and texture.
Inspirational Enchantment
Capriccio had its genesis during an artists’ trip to Scandinavia in the summer of 2006. The idea for the color palette came from Anders Zorn’s studio and museum in northern Sweden. The palette he typically used consisted predominantly of browns and earth tones, with a striking splash of red.
The application of red here, in Capriccio, was inspired by an Edgar Degas show at the Copenhagen museum. Degas would frequently employ red on paintings mainly consisting of secondary colors as a means to lead the viewer’s eye across the painting. The compositional ideas in Capriccio came from earlier studies of Mannerist and Venetian artists in Italy, specifically their use of embedded curves to – again – lead the observer’s eye through an artwork. On top of all that, there’s a dash of inspiration from the New York School painter, Clyfford Still, thrown in.

Art from Ants
For the creation of the composition, Dulcinea would put to canvas, a form of artificial intelligence known as “complex adaptive systems.” Paul drew upon the Santa Fe Institute’s publication, Swarm Intelligence: from Natural to Artificial Systems. Rodney Brook’s ground-breaking subsumptive architecture rulesets also had a hand in how the AI agents of Paul’s creation would interact within a simulated space in order to produce the emergent “architecture” of the painting to come.
Through computer simulation, “breadcrumbs” were deposited along the curving and straight lines in the painting. Then, AI agent “ants” were given simple rules of behavior to wander around and find the breadcrumbs, whereupon they would deposit a “pebble” at that location. Within limits, an ant could also deposit a pebble next to an existing pebble. This activity created a complex and adaptive system based upon the ants interacting with the emerging pattern.
Later, the pebbles deposited by the virtual ants were transformed into brushstrokes for Dulcinea to place on the canvas – yielding a feeling of spontaneity and movement across the painted work.

Dulcinea Adapts
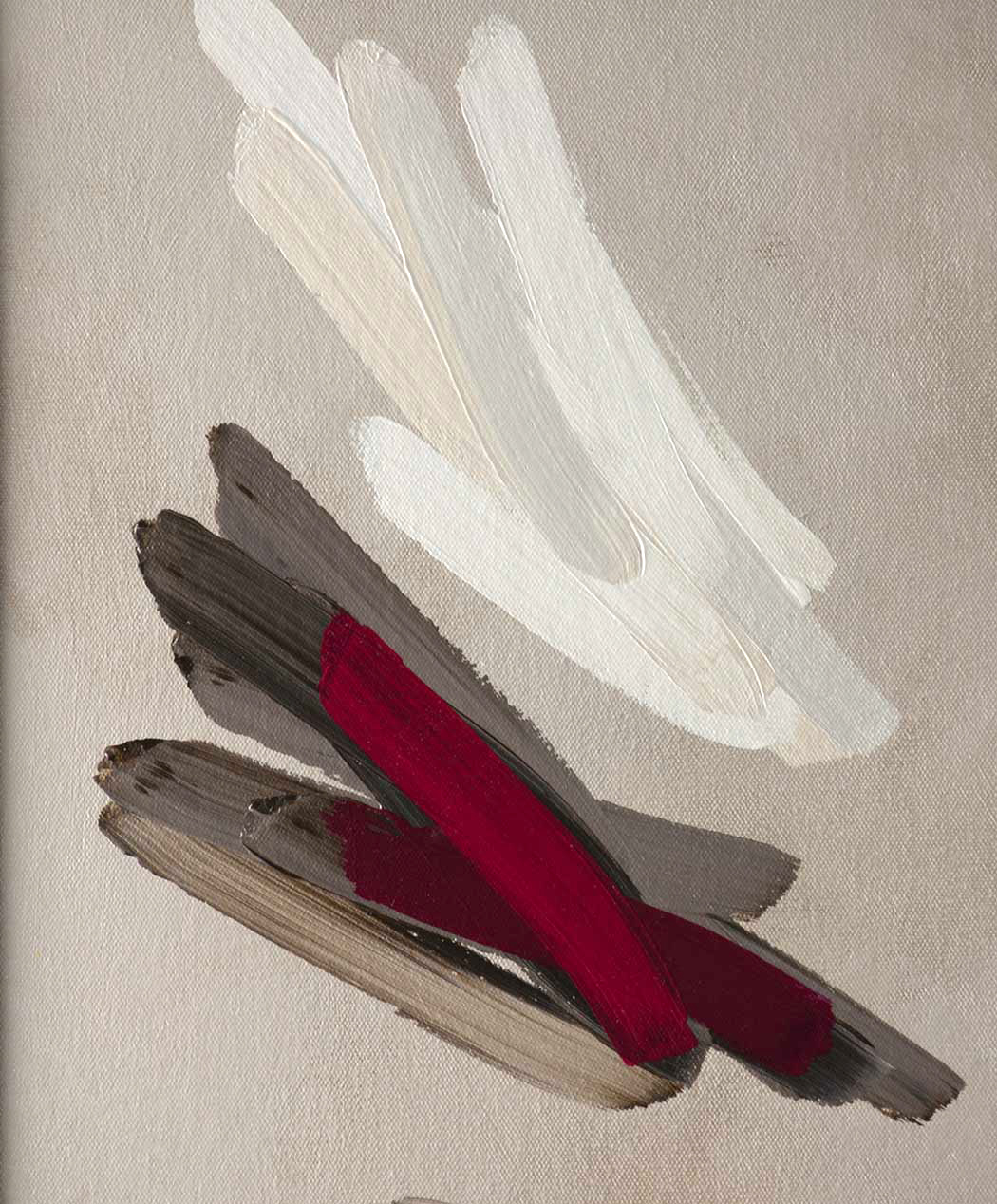
To achieve the rich, thick swathes of paint Paul envisioned for the piece, a new brushstroke was needed for Dulcinea. As the robot’s agile wrist dips the brush into the paint – and after first finding and contacting the surface of the liquid – a greater depth of dip was added to load even more paint onto the brush. The stroke is then applied at an increasing angle and with an increasing amount of pressure, thus progressively applying paint from higher up on the flat side of the paintbrush’s bristles. The brushstroke is then repeated in the opposite direction, applying additional paint, but from the other side of the brush. This new technique created the strong, rich lines of paint visible in the painting. Paul dubbed his new stroke a doppio.
In addition to the paint being thickly applied, each stroke has a randomly-placed, slight bend or curve added to it. This subtle touch creates a more human-like appearance to Dulcinea’s brushstrokes. The strokes were applied wet-on-wet by Dulcinea to achieve the blended colors you see in the final painting.